Design Day 2020
For the first time in the history of our event, we held our 2020 Engineering Design Day in a virtual format via Zoom on May 6, 2020. If you were unable to attend the virtual event, please see the Electrical & Computer Engineering projects that participated below.
Please visit our College of Engineering Design Day website, which has an archive of all of our Engineering Design Day events.
Design Day Projects

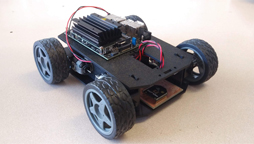
Today, autonomous driving vehicles are very popular but many consumers cannot afford such a pricey car. The expense of these vehicles comes from the hardware and software components in these vehicles which can be priced up to $8000 alone per “auto-pilot” package. If these components could be completely disposed of, then the overall cost of making an autonomous vehicle could be drastically lowered, allowing for great advancements in making autonomous vehicles available to people of all economic backgrounds.
- Team Members: Ramiz Hanan, Jorome Macedo, Rigoberto Macedo, Michael Olivas, Leo Peralta, Dylan Wraith
- Advisor: Dr. J. Xie
- Autonoumous Vehicle's Video

We plan to create a respiratory monitoring belt that will track breathing related health issues such as asthma, bronchitis, sleep apnea, and other similar diseases at an affordable price for the everyday consumer. Devices similar to this have a price tag so high, that most people shy away from making the purchase. In the professional scene, our designated market would most likely be geared towards doctors, athletes, and nutritionists who are in need of an accurate and lightweight device.
- Team Members: Rami Alsayeq, Neever Kryakos, Alejandro Martinez-Bueno, Albert Rafou Peter, Sadik, Karam Saleem
- Advisor: Dr. Y. Ozturk
- Breathe Well's Video
- Breathe Well's Website
Our team will be creating a group of unmanned ground vehicles that will be able to execute power intensive tasks such as matrix multiplication through wireless distributed computing, which will solve the common drone problem of needing to off load such tasks to a remote site for computation.
- Team Members: Jayson Del Moral, Sky Johnson, Ben Leeds, Fate Alexis Lumba, Evans Nik Matabwa, Joseph-Eli Omengan, Jed Vargas
- Advisor: Dr. J. Xie
- Distributed Computing Frameworks for Unmanned Ground Vehicles'sVideo
- Distributed Computing Frameworks for Unmanned Ground Vehicles's Website

To extend the effective range of utility drones, we conceptualized a network of permanent, self-powered, RF connected charging platforms. For any drone, we can install a battery pack and charger mount to allow wireless charging at any platform. This enables a drone to travel any arbitrary distance along the platform network, only limited by the density of the platforms. A landed or passing drone could also communicate and transmit data to platforms, which can relay the data back to a base station for analysis.
- Team Members: Michael Bukowski, Michael Fox, Matthew Houser, Liam Rapoza, Donovan Rowzee, Dean Wedeking, Logan Jay Williams
- Advisors: Dr. C. Mi (SDSU), Mr. Andy Bushnell (ARRS Technologies)

The DX Demo - Testbed is a device that combines innovative biological processes to demonstrate the ability to rapidly decrease the time of accurate diagnosis. In the future, this product would be used to analyze blood samples to assist medical professionals to diagnose and choose successful treatment plans. Currently, the goal of this project is to demonstrate how combining standard biology lab practices with automation can advance the medical field and improve the quality of healthcare.
- Team Members: Sarah Cartwright (ME), David Knight (ECE), Anthony Lam (ECE), Anna Stahlak (ME), Garen Stein (ME), Savannah ter Veer (ME), Aaron Tran (ECE)
- Advisors: Dr. B. Aksanli (ECE), Dr. S. Shaffar (ME). Mr. Minh Duong (Simplexity), Mr. Jeff Wield (Simplexity)
- Sponsor: Mr. Minh Duong, Simplexity
- DX Demo's Video
- DX Demo's Website
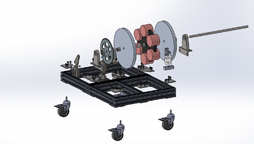
Aztec Racing’s powertrain development team currently utilizes a Dynapack Chassis Dynamometer provided by a current sponsor to measure horsepower, torque, and load on the engine to calculate efficiency. However, the Dynapack has too high of an input torque threshold, creating inaccurate engine loading scenarios and therefore inaccurate measurements. Our project attempts to remedy this by designing a dynamometer that has a lower input torque threshold in order to achieve more accurate measurements.
- Team Members: Brady Bounds, Austin Hoang, Zachary Morey
Advisor: Dr. S. Seshagiri
The SAR-D1 digital synthesizer is an easy-to-use synthesizer, created with affordability and portability in mind. This device is a way to introduce people to the world of electronic music production, but still provide enough power and features to entice even the most veteran of music producers. The core is based on Xilinx Artix-7 FPGA, and information will be stored on an Arduino. Buttons will allow anyone to select their sound preference based on stored presets, and from there one can plug in and play.
- Team Members: Omar Ahmed, Uvaldo Resendez, Jessica Stensby
- Advisor: Prof. B. Dorr
- Frequency Modulated Digital Synthesizer's Video
- Frequency Modulated Digital Synthesizer's Website

With the goal in mind to focus on home automation and design, our team has envisioned a new device implementation for the home car garage, G.A.P.S., the Garage Assisted Parking System. The G.A.P.S. system seeks to update modern car garage technology, by opening garage doors with web application and RFID. It also includes parking distance detection as well as active motor detection ensuring the safety of the driver from possible carbon monoxide poisoning that result in multiple accidental deaths every year.
- Team Members: Jacob De Loa, Tom Jimenez, Sara Kouyoumjian, Jordan Trinh
- Advisor: Dr. D. Nguyen
- Sponsor: Mr. Robert Kane, Street Fair Foods, Inc.
- Garage Assisted Parking System's Video
- Garage Assisted Parking System's Website
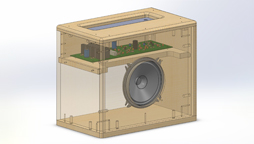
The Guitar Amplifier and Printed Circuit Board Starter Kit is a high school level STEM project intended as an introduction to electronics and engineering. The starter kit comes with the necessary components and a step-by-step procedure for the amplifier and its assembly. The assembled product is an acoustically sound and aesthetically pleasing guitar amplifier or speaker.
- Team Members: Thomas Buchanan (ME), Jesus Cuen Reyes (ECE), Viceroy Nieva (ECE), Abdulla Obaidan (ME), Matthew Smith (ECE), Robert Vallejo (ME), Clayton Woodward (ME)
- Advisors: Dr. S. Shaffar (ME), Prof. B. Dorr (ECE)
- Sponsor: Prof. B. Dorr, SDSU
- Guitar Amp and PCB Starter Kit's Video
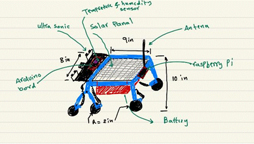
The Lotus 2.0 is a partially autonomous rover that will roam the Salton Sea to take data measurements using a number of sensors, including temperature, humidity, and object detection. The user will have control over the rover’s target destinations while the rover takes measurements as it locates to the desired destination. It will be battery-powered, which will be charged through a solar panel. The user will also be able to monitor the rover’s power consumption to make the best use of its runtime before it has to charge up.
- Team Members: Aqeel Aoro, Raymar Asanas, Duraid Gorgies, Ferdinand Mateo, Mark Bryan Navarro, Juan Raya, Rasha Shaaya
- Advisor: Dr. Y-K. Teh
- Lotus 2.0's Video
- Lotus 2.0's Website
MakerKids is franchising and is in search of gadgets to display in their lobby that is appealing to new clients, while helping children build a positive relationship with technology.
- Team Members: Luke Draney, David Angelo Felipe, Christopher Frutos, Justen Hitchcock, Benjamin Maldonado, Nicholas Sullivan, Matthew Tarantino, Xuong Truong
- Advisors: Prof. K. Arnold (SDSU), Mr. David Grossman (Northrup Grumman)
- Sponsor: MakerKids
- MakerKids's Website

The Power-Trip module monitors the load of each circuit of a residence at the breaker. The measurements are then hosted to a web server via a Raspberry Pi for access via both smartphones and personal computers. The data is displayed visually for historic usage as well as numerically for current power usage. In this way, consumers are able to both remotely view power consumption on a per circuit basis to better determine where power is being wasted, while keeping an eye on their usage throughout the day.
- Team Members: Christopher Alsheikh, William Cushing, John Deubler, Tanzeem Salim
- Advisor: Dr. R. Sabzehgar
- Power-Trip - Smart Circuit Breaker's Video
- Power-Trip - Smart Circuit Breaker's Website
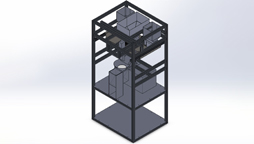
The goal of this project is to design, analyze, build, and test a machine that allows customers to select the toppings of a granola that is then mixed and distributed straight to them, all within a short amount of time. The Smart Granola Kiosk produces 20 one-pound servings of customizable granola made up of a base granola and multiple different toppings. The final production model of this kiosk would be utilized in a grocery store.
- Team Members: Anthony Alkatib (ME), Thomas Durso (ME), Tristan Kaskoun (ME), Miles Kiefer (ME), Wenjie Kuang (ECE), Jiuzhang Peng (ECE), Gustavo Torres (ECE)
- Advisors: Dr. S. Shaffar (ME), Prof. K. Arnold (ECE), Mr. David Burney (D&K Engr), Mr. Victor Escobedo (D&K Engr)
- Sponsor: D&K Engineering
- Smart Granola Kiosk's Website

The Smart Greenhouse project offers the agricultural world, a fully autonomous and controlled environment where desired crops are being monitored and control systems come to the rescue, whenever needed. With implementation of a variety of sensors, different key factors like temperature, humidity, light and soil moisture levels are measured and using proper machine learning algorithms, irrigation, ventilation and other systems cover the needs of the crops. The user interface allows the farmers to closely monitor the crops.
- Team Members: Siamak Doraghi, Hanieh Moein, Nika Nizharadze, Emilio Nuno
- Advisor: Dr. S. Manshadi
- Smart Greenhouse's Video
- Smart Greenhouse's Website

Our team is designing a wireless charging system that will be powered by solar panels. With this design, our charging station can be lightweight and portable, providing charging capabilities for your remote controlled car wherever you are. The car will drive onto the charging platform, pressing down on two push button sensors, which will initiate the current to flow from the transmitter coil and subsequently into the receiver coil and into the car's battery.
- Team Members: Abdulmohsen Alshewaish, Markell Lindley, Jared Renard, Mojtaba Turkmani, Nafeis Weixelman
- Advisor: Dr. S. Manshadi

Farming is difficult without access to grid power to sustain water and equipment. Additionally, the high costs of using diesel engines to provide irrigation means that farmers are not able to fully utilize all the good land they have. The project aims to create an off grid solar powered irrigation system that can be used anywhere in the world. With a limited budget, the project is scaled down to provide water for tomatoes and peas in rural Morocco.
- Team Members: Jericho Uy, Brian Che, Mutiu Saliu, Saad Aldujaili, Brandon Natividad, Amine Nassif, Fadi Zako
- Solaristic's Video
- Solaristic's Website

Our project focuses on capturing human motion in real time and using it to execute commands a robot can follow. We accomplished this task by using wired and wireless interfaces. The wireless Bluetooth interface was used to capture and send motion packages to a Central Processor. The Central Processor formats the data and executes commands via a wired UART interface with the robot. Hand gestures were well defined in order to keep the robot from performing undesired action. The system works well, perhaps if we had more time we could really refine it and add more actions.
- Team Members: Kyle Armstrong, Dion Dean, Cliff Phan, Enrique Sosa
- Technomancy's Video

With the world’s increasing population there is an increase in daily required energy. Earth itself cannot change in a way to provide the needed energy to supply the services to satisfy social and economic development, welfare and health. With the use of renewable energy resources, we can help supply the energy demand for future generations. Our attempt to find a solution is our design of a dual power generation system which can be implemented on busy roads, railway networks and highways.
- Team Members: Jawa Alaskar, Abdullah Alrasheed, Ahmad Alsarhan, Mohammad Alzamami, Adam Draxler, Brandon Fong, Lorans Hirmez, Joseph Morga, Charles Sotto
- Advisor: Dr. C. Mi
- Your Engineering Solutions (YES) Video
- Your Engineering Solutions (YES) Website